Robotics
Heterogeneous Artificial Agents for Triage Nurse Assistance
A dream of humanoid robot researchers is to develop a complete “human-like” (whatever that means) artificial agent both in terms of body and brain. We now have seen an increasing number of humanoid robots (such as Honda’s ASIMO, Aldebaran’s Nao and many others). These, however, display only a limited number of cognitive skills in terms of perception, learning and decision-making. On the other hand, brain research has begun to produce computational models such as LIDA. In this paper, we propose an intermediate approach for body-brain integration in a form of a scenario-based distributed system. Busy hospital Emergency Departments (ED) are concerned with shortening the waiting times of patients, with relieving overburdened triage team physicians, nurses and medics, and with reducing the number of mistakes. Here we propose a system of cognitive robots and a supervisor, dubbed the TriageBot System that would gather both logistical and medical information, as well as take diagnostic measurements, from an incoming patient for later use by the triage team. TriageBot would also give tentative, possible diagnoses to the triage nurse, along with recommendations for non-physician care Some of the robots in the TriageBot System would be humanoid in form, but it is not necessary that all of them take this form. Advances in humanoid robotic design, in sensor technology, and in cognitive control architectures make such a system feasible, at least in principle.


Design and Optimization of a Fuzzy-Neural Hybrid Controller for an Artificial Muscle Robotic Arm Using Genetic Algorithms
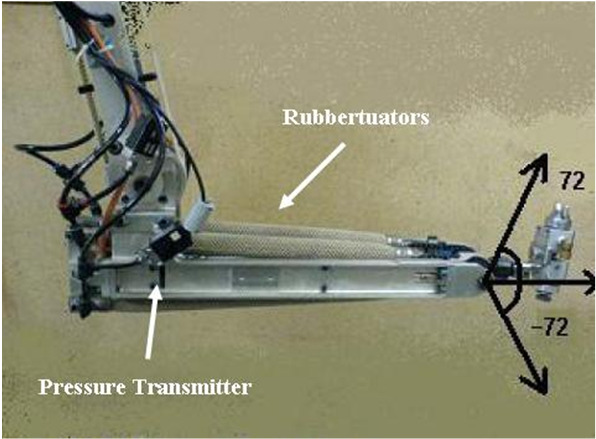
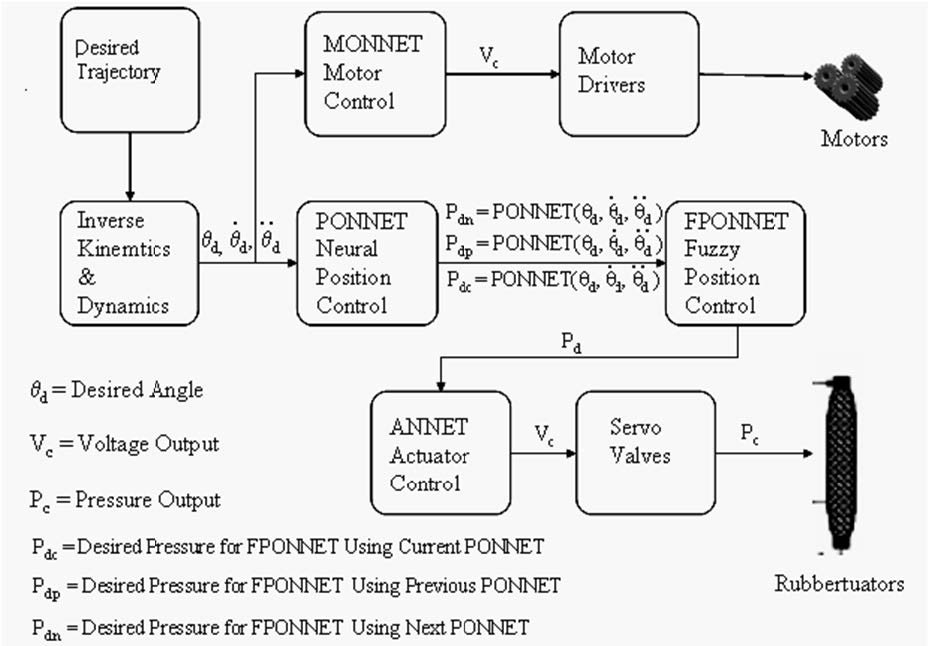
Humanoids are increasingly used in the service sectors around the world to work with, or assist humans. However current humanoid designs place limitations on direct engagement with the human in terms of safety and usability. In this paper, we present an approach for the control of hybrid, high-speed and safe human-robot interaction systems with highly non-linear dynamic behavior. The proposed approach comprises the three soft computing techniques, namely back propagation neural network, fuzzy and genetic algorithms. This open-loop controller was applied to a Bridgestone Hybrid Robot Arm (BHRA). BHRA has three electric motors and four artificial muscles, arranged in an agonist/antagonist, and opposing pair configuration, that drive the five-degrees of freedom of the robot arm. The behaviors of the artificial muscles are observed under the effects of the links driven by the electric motors and it is shown that the proposed biologically-plausible controller could produce more accurate trajectories at higher speeds when compared to conventional PID and stand alone or combined versions of Neural Network and Fuzzy controllers.
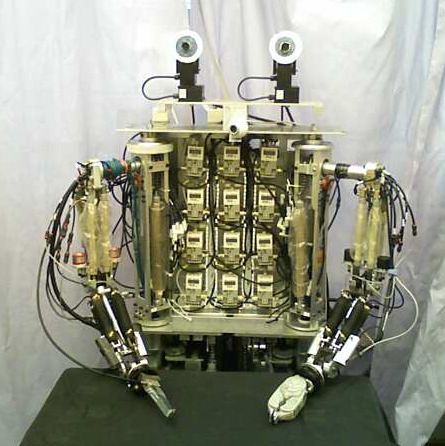
Application of a Hybrid Controller with Non-Contact Impedance to a Humanoid Robot
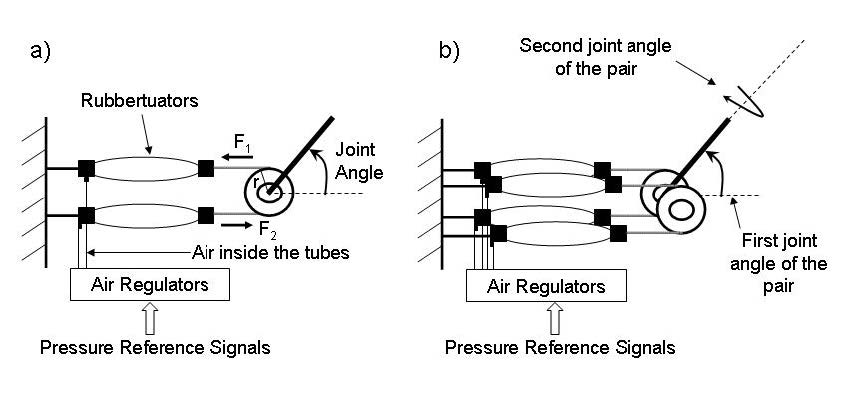
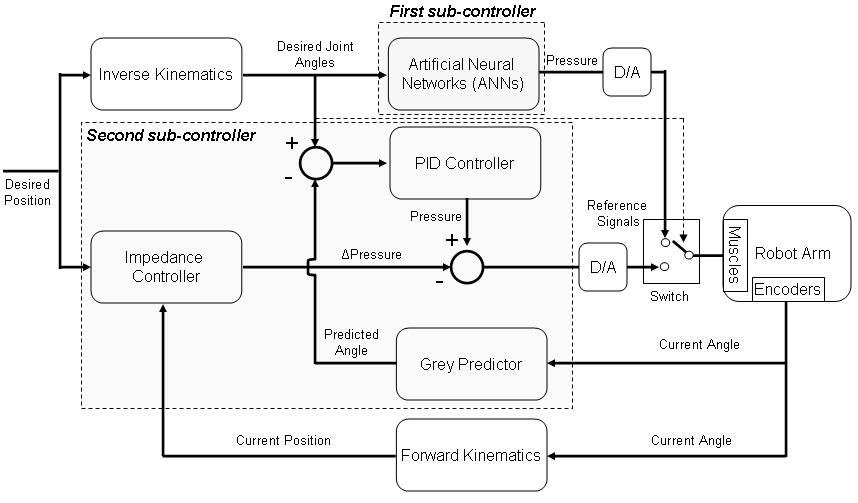
This paper addresses the design issues of a hybrid neural network-based PID control with grey prediction and noncontact impedance as applied to a humanoid robot named ISAC. ISAC uses two six degree-of freedom manipulators called Soft Arms which are actuated by pneumatic artificial muscles. High nonlinearities such as hysteresis and unknown dynamics of these muscles make arm control a challenging task. ISAC was designed to assist physically challenged, thehefore it has to fulfill safety precautions concerning its movements. To evaluate the proposed controller, it was tested for human-like grasping motions while guaranteeing the safe interaction with humans. The controller consists of two sub-controllers, an open-loop neural networkbased controller which is managed by non-contact impedance and powered by grey prediction.
A Robot Rehearses Internally and Learns an Affordance Relation
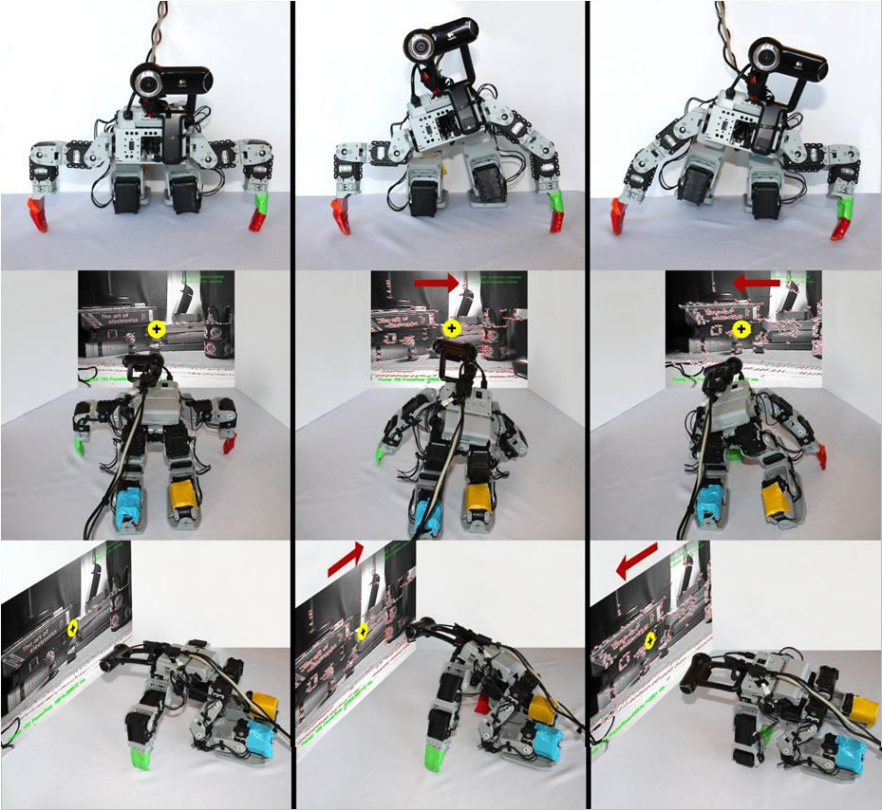
This paper introduces a novel approach to a crucial problem in robotics: Constructing robots that can learn general affordance relations from their experiences. Our approach has two components. (a) The robot models affordances as statistical relations between actual actions, object properties and the experienced effects of actions on objects. (b) To exploit the general-knowledge potential of its actual experiences, the robot, much like people, engages in internal rehearsal, playing-out "imagined" scenarios grounded in but different from actual experience. To the extent the robot veridically appreciates affordance relations, the robot can autonomously predict the outcomes of its behaviors before executing them. Accurate outcome prediction in turn facilitates planning of a sequence of behaviors, toward executing the robot's given task successfully. In this paper, we report very first steps in this approach to affordance learning, viz., the results of simulations and humanoid-robot-embodied experiments targeted toward having the robot learn one of the simplest of affordance relations, that a space affords traversability vs. impediment to a goal-object in the space.

Learning Structural Affordances through Self-Exploration
The goal of this research is to develop a cognitive developmental approach for a humanoid robot so that it can provisionally discover self-affordance relations between certain arm limb movements and corresponding motor units by exploring the outcomes of its random arm movements while in a crawling position. Learning of the right and the left arm affordances is based on self-exploration and a set of experience similarly to how a human baby discovers action-effect relations of own arm movements. We address the early development of self-affordances, like infants, which encodes the relationships between actions, objects, and the effect on the environment.
Developing Robots for the Hospital Emergency Room