Biomechatronics
Development of a Meso-Scale Intelligent Robot for Hydrocolonoscopy
Hydrocolonoscopy facilitates an excellent environment and opportunities to develop capsule robots that can have significantly enhanced diagnostic and therapeutic functionalities for colonoscopy. Leveraging on pioneering work in the field of active locomotion of capsule robots, in this research, we have developed a soft-tethered endoscopic capsule based on impeller propulsion and a water jet propulsion for Hydrocolonoscopy.

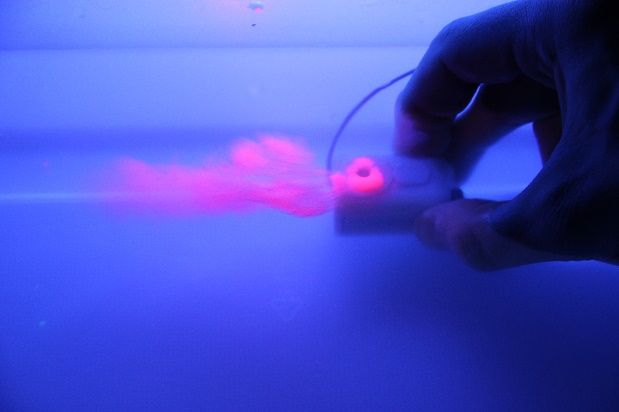
And also check for the patent for the waterjet version: Hydro-jet endoscopic capsule and methods for gastric cancer screening in low resource settings
Intelligent Grasping Classification Method for a Smart Prosthetic Hand

The main contribution of this work is the development and evaluation of the first step of a novel approach for a prosthetic hand to learn motor skills for more effective and fast object manipulation and grasping. Inspired from how initially untrained muscles acquire newly formed motor skills in neuromuscular brain development process, we try to implement an intelligent way of making a prosthetic hand be able to learn motor skills through a babbling stage. The ability of learning motor skills by the smart hand will decrease the need for amputee’s attention and increase the efficiency of the manipulation and grasping of objects. In this study, object’s distances and hand orientation data are used for classifications to more effective and fast object manipulation and grasping.
Mechanical Leg