Agriculture
Development of a Meso-Scale Intelligent Robot for Water Leak Detection
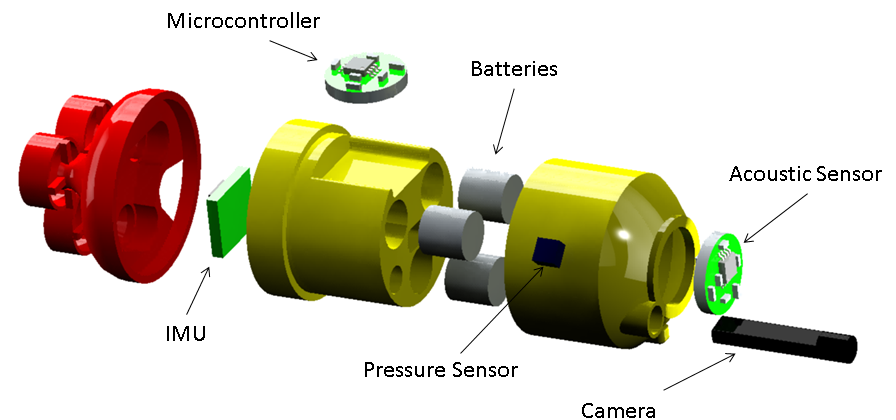
The goal of the proposed research is to build a cost effective meso-scale intelligent capsule robot (MICR) prototype that can travel long distances through water pipes and perform accurate, fast, and inexpensive pipe inspection. There is approximately 1.18 million miles of water pipeline providing service to approximately 312 million people in the United States and all of these lines would benefit from routine inspection. The leakages and water-contamination may go unnoticed for years and may cause extraordinarily dangerous water pollution. In practice, this inspection process is complicated, expensive, and prone to human error, noise, and infrastructure. A radical change in water pipe surveying technology, based on the use of MICR, could potentially accelerate the inspection process, enhance inspection quality, and reduce cost. The specific product innovation proposed is the development of a small MICR with capabilities to passively navigate through water pipes to record, identify and report various types of cracks. Specifically, the innovativeness of the resulting MICR: Pipe Inspector combines the following two innovations: First, the proposed approach will uncover innovations in a generalized MICR system/software architecture platform from which families of MICR products may be developed for pipe specific tasks. Secondly, research will be conducted to advance computer software algorithms for: Robot navigation and localization through water pipe/sewer like environments using SLAM (Simultaneous localization and mapping) and IMU (Inertial Measurement Unit) localization algorithms; Computer vision to identify various types and location of pipe defects; and Leak detection model using acoustic and pressure sensors.
Submerged Imaging for Root Health
In monitoring plant health and phenology, one of the treatments is submerging roots and observing the root system in various transparent liquid mediums. In these experimental setups, the plants are separated from the nutrient solutions to measure the growth of the roots. However, this method not only causes damages in roots but also stresses the plants and affects the accuracy and the repeatability of the measurements. The goal of this research is to develop a multi-camera system to capture root images within the growing environment of the plant, real-time measure the growth of the roots automatically using image processing techniques and store this data in a database to model the growth of the plant. The proposed setup contains four cameras in orthonormal directions to get panoramic images of the whole roots from head to tail. This camera system will be moved up and down by a linear drive actuated by a servo motor. The system will be controlled wirelessly by a minicomputer that will have live stream video support, range and view finder sensors.

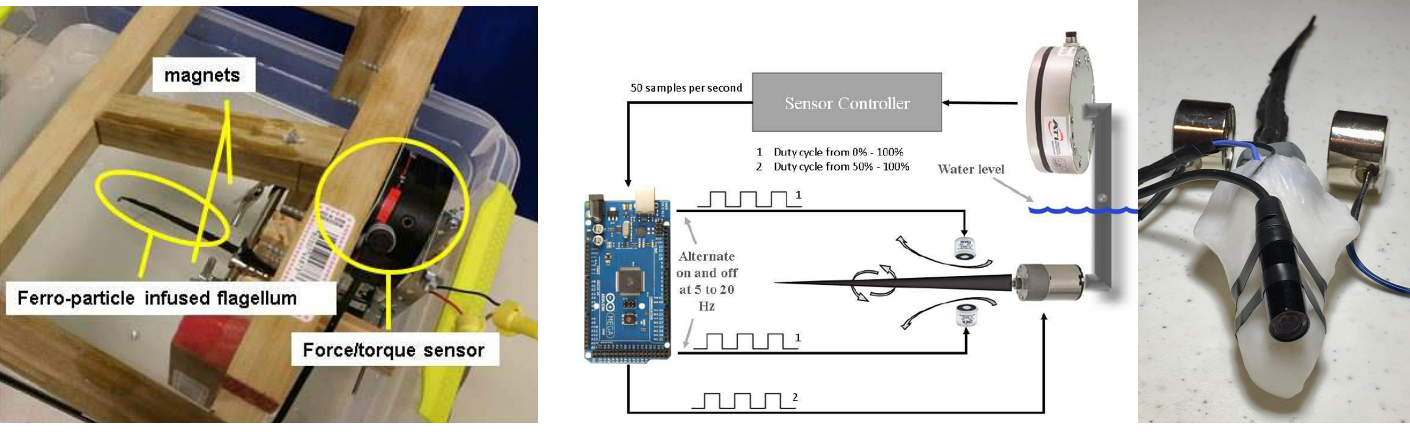
Flagella-Propelled Bio-Inspired Submersible Robot
In recent years, hydroponic farming has experienced exponential growth due to several factors including rural land scarcity and increasing demand for food. Hydroponic production requires a high degree of monitoring, maintenance and precise control of several factors to be successful. Root diseases such as Pythium occur in all types of hydroponic systems. Root diseases are easily detected in solution culture systems as the roots can be seen and disease development on the roots is often noticed before symptoms are visible in plant shoots. Nevertheless, root assessment by the growers is time consuming and may stress or damage the plants. Also, water leak detection for underground irrigation systems is time consuming.